ROTORのQ-RINGSの大きな特徴としてOCPのセッティングができるという所です。このOCPという概念はROTOR独自のものとなるので、ROTORのクランクとチェーンリングを使っている方の特権的なモノになります。
ROTORの世界へようこそ
私自身もしかしたらにわかだったかもしれません。OCPというROTOR独自の機構を改めて見つめなおして、折角ROTORのパワーメーターを使っているので有効活用してみました。
[ysid 8434366009377]
[ysid 8434366013404]
OCPとは?
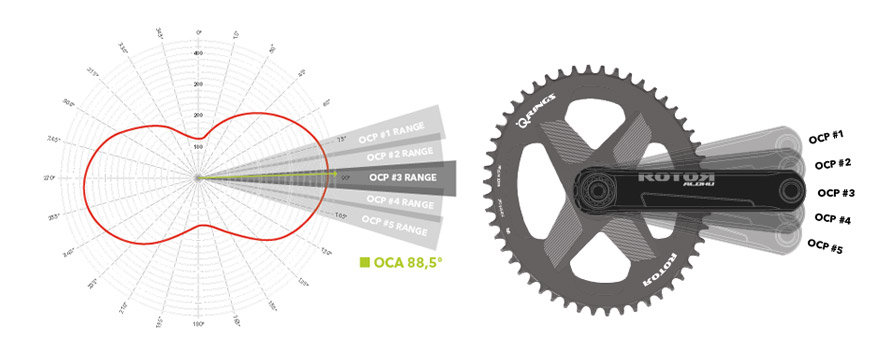
ROTORの楕円チェーンリングはピークトルクと楕円の最大位置を合わせるという独自の構造を持っています。
自分自身のペダリングの癖と合わせる事で「身体を機材に合わせる」事無く「機材を身体に合わせる」という事ができるのがROTOR唯一無二の特徴です。
具体的には大きく5つのゾーンに分類してどの角度に自身のピークトルクが来ているかをROTORのパワーメーターと専用のアプリで調べる事で該当する番号にチェーンリングの取り付け位置を調整するだけで、まるでオーダーメイドチェーンリングを作ったような一体感を得る事ができます。
私もやってみました
思い至った夜も遅い時間、165mmのROTOR INPOWER DMクランクに変更したので念のためOCPのセッティングもしてみようと思ってやってみました。
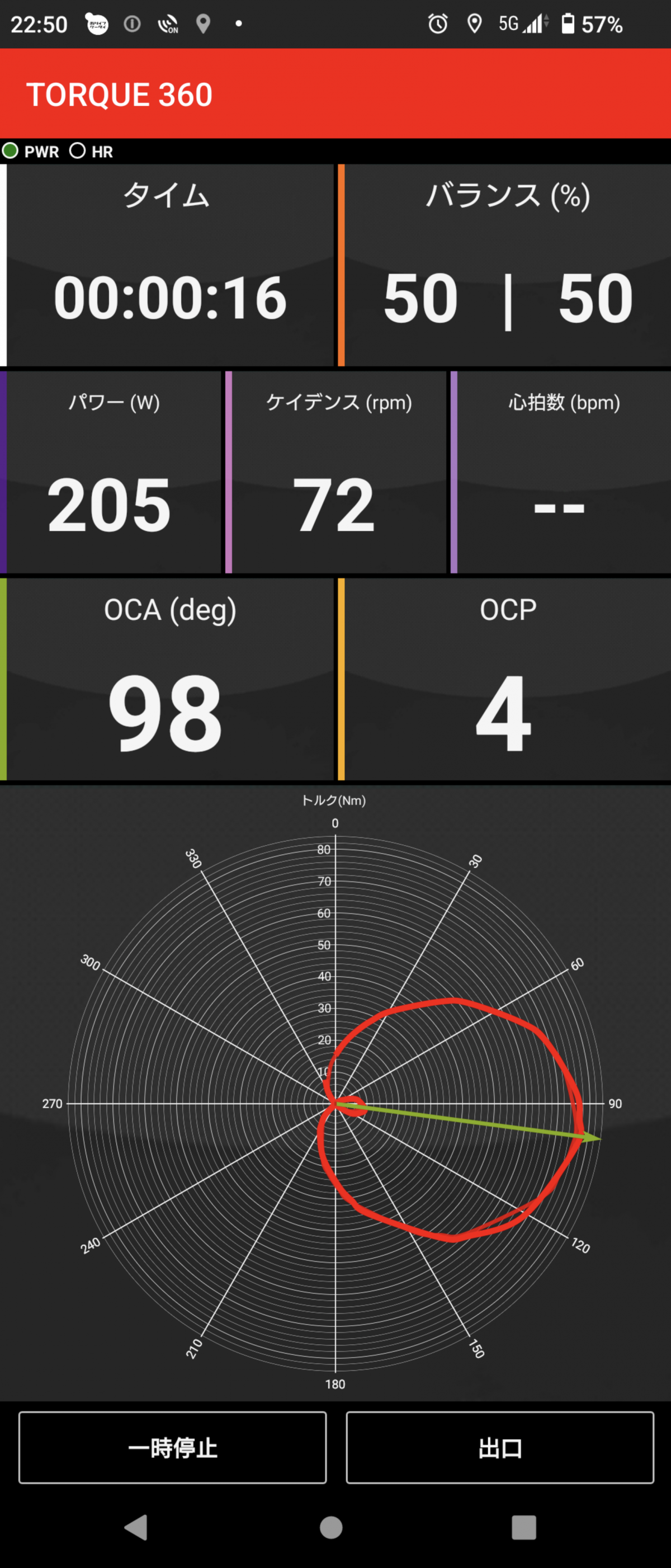
ずっと標準のOCP3で使っていたものの、何度トライしてもOCP4が推奨という値が出てきました。引き上げを意識したり、踏み方をどう変えても結局4となる事がこの度わかってしまいました。
3時方向よりも少し下向きの98度の位置がピークになっている感じでした。元々ペダリングの踏み下ろしを意識して足の重さと筋力を活かしたペダリングを重視していたので、確かになーとは思いました。
OCPセッティング

INPOWERは専用の工具が付属されているのでそれを使って、チェーンリングをつけ外しします。
クランク自体にOCPの数字がマークされているのでそれを頼りにOCP4にセットします。ちなみに4は向こう側です。

ROTORのアプリでトレーニングモード的なモノで走ってみたりして試しましたが、確かに引っかかりが無いというか違和感が薄くなりましたね。
(もしかして、今まで損していた?、、、、、)
ROTORのチェーンリング自体効率的に走れるので特にOCPの調整に必要性を感じていなかったのですが、更に一歩進んでより効率が上がりそうな気配です。
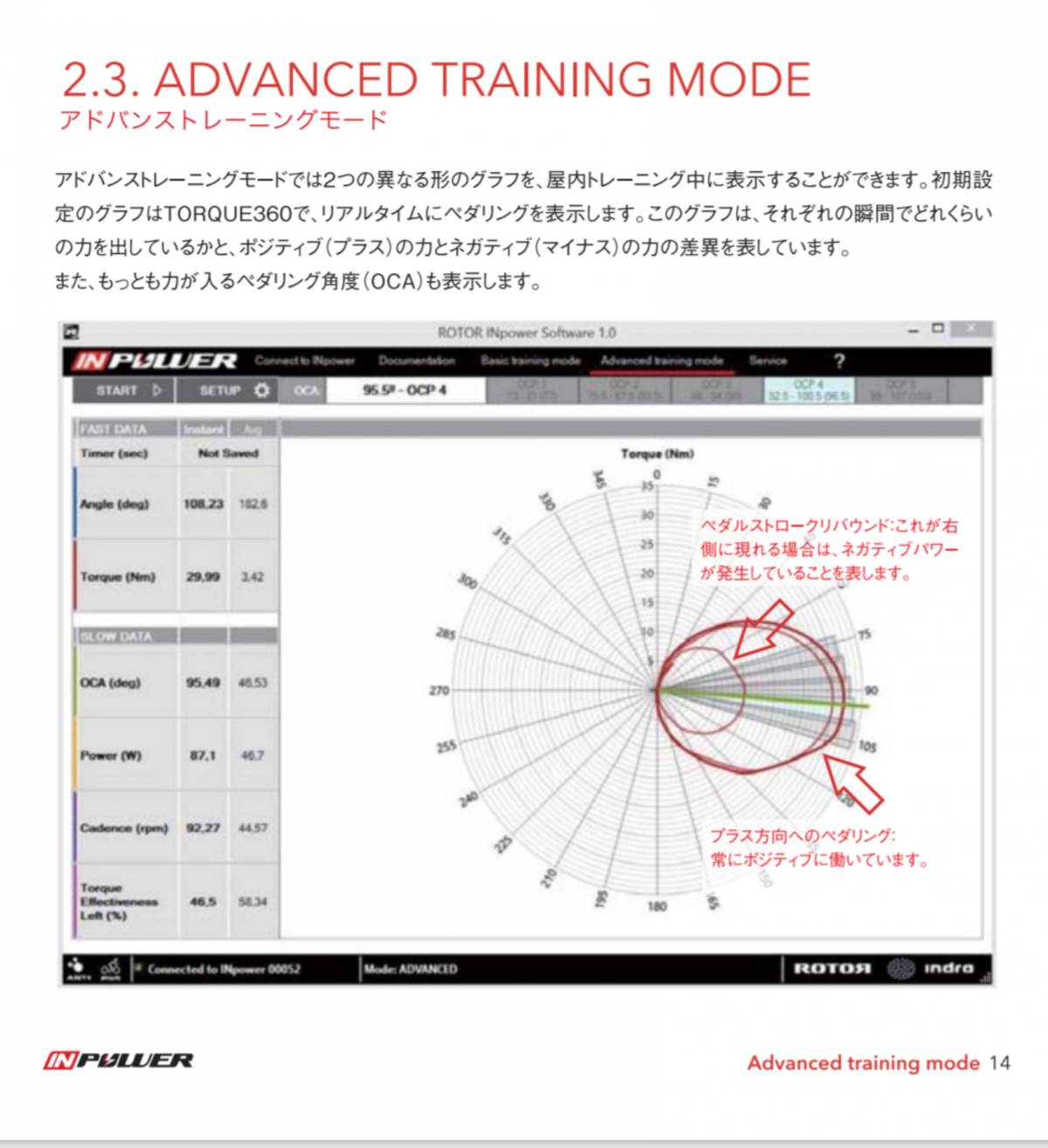
ちなみにTORQUE360というモードでグラフをリアルタイムで見る事ができるのですが、そのグラフの見方について調べてみると、ポジティブトルクとネガティブトルクを見れるという事でした。
というわけで、意図的にペダリングを変えてグラフの調整をしてみました
まずはネガティブトルクを多めに出してみました

大きい円の中に小さい円が出来上がりましたが、これがネガティブトルクという事です。
引き足が重りになっているとこの数値が出てくるので、このネガティブトルクは当然ゼロになっている方が良いです。
というわけで、
ポジティブのみが出るように踏んでみた
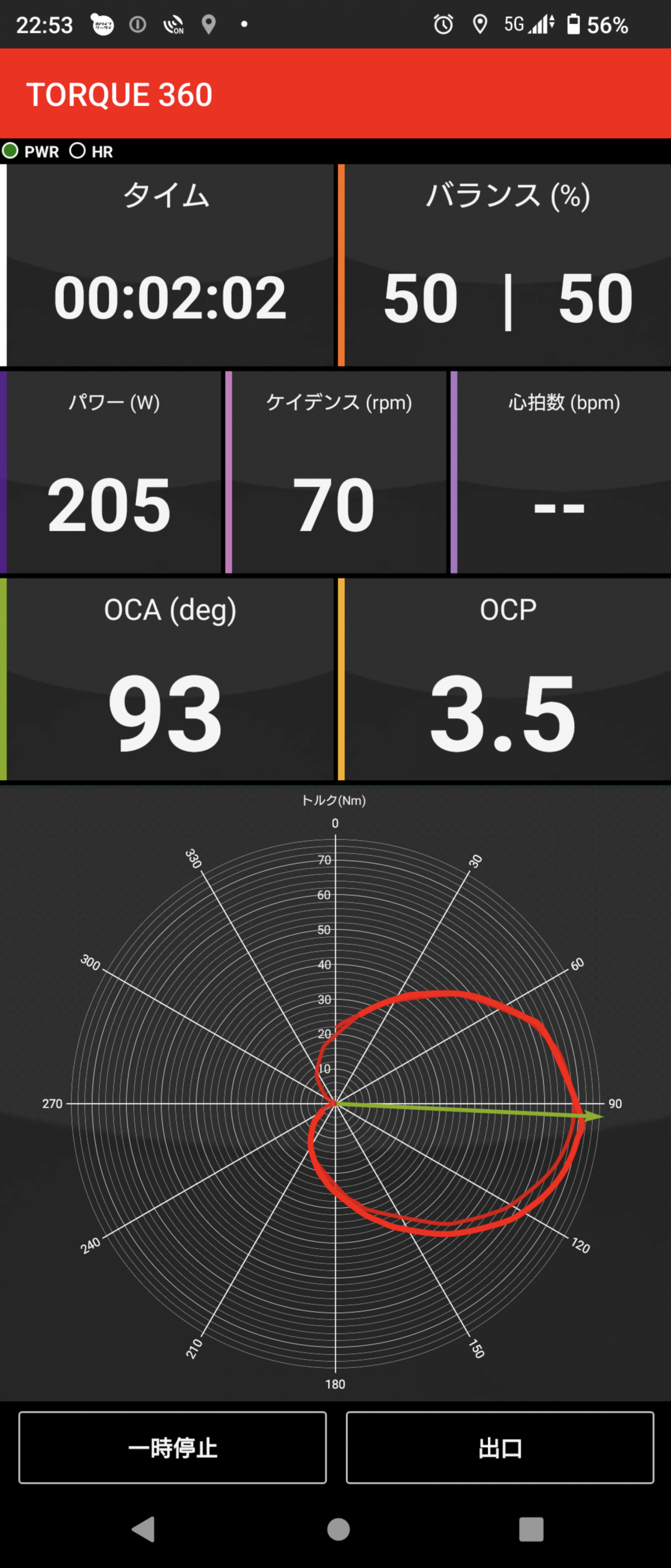
今度は引き足も意識したペダリングにする事でリンゴみたいな形の円が出来上がりました。
[ysid 8434366009377]
[ysid 8434366013404]
念のためですが、私が使っているのは片足計測のINPOWERなので、2INPOWERを使ってこの計測をすると上の方に乗せた画像のピーナッツみたいな形の円になるようです。
トレーニング目的だとやっぱり2INPOWERの方がデータが多く取れるので良さそうですね。
ちなみに、この画面はリアルタイムで見る必要があるので固定トレーナーに乗ってスマホを目の前において確認する必要がありますよ。
ただし、アプリ上で履歴を確認するとデータの確認も取れるのでOCPのセッティングに関しては外でも可能です。固定と実走行では多少違いがでると思うので、どちらも確認してみてもいいかもですね。

というわけで、ROTOR愛好家を名乗っておきながら、今まで全く使っていなかった独自のペダリング解析機能を使ってみた結果、より深いセッティングを煮詰める事に成功したっぽいというお話でした。
高性能なパワーメーターと楕円チェーンリングを検討中の方はROTORおススメですよ!